안녕하세요!! 입니다 :))
오늘은 드론 초심자나 초보자를 위한 드론 비행 원리 12번째 시리즈입니다. 12회에서는 드론 초심자에게는 다소 생소한 개념일 수 있는 다양한 캘리브레이션(calibration)에 대해 써보도록 하겠습니다. 단, 기종 및 상황에 따라 일부 내용이 다를 수 있습니다.
교정(Calibration)
캘리브레이션(Calibration)이란 드론에 사용되는 기기나 센서에 문제가 생겼을 때 초기값으로 복원하는 과정으로 일종의 캘리브레이션 과정이라고 생각하시면 됩니다. 비행 전에는 조종사가 작업하는 동안 조종할 수 있도록 캘리브레이션(Calibration)을 통해 기체를 정상 상태로 비행시켜야 한다. 이러한 절차를 따르지 않으면 다음과 같은 위험한 상황에 노출될 수 있습니다. 나. 항공기의 비정상적인 비행으로 인한 추락.
교정 유형(Calibration)
교정(교정)의 종류에는 컨트롤러 교정, 전송 교정, 나침반 교정, 수평 교정 및 가속도계 교정이 포함됩니다.
1. 컨트롤러 보정
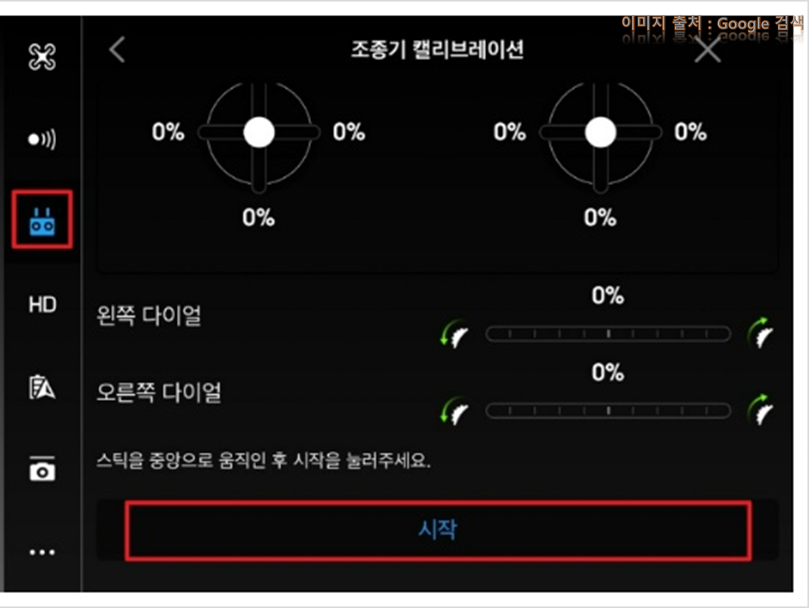
컨트롤러 스틱의 값을 설정하는 컨트롤러 캘리브레이션은 파일럿이 스틱을 조작할 때 FC(Flight Controller)가 정확하게 입력되는지 확인하는 작업으로, 이륙할 수도 있고 안 할 수도 있습니다.
2. 전자 전송(ESC) 교정.

ESC(Electronic Transmission) 캘리브레이션은 엔진을 제어하는 ESC(Electronic Transmission)의 상태를 확인하는 것으로 액셀러레이터를 밟으면 엔진의 최대 RPM 값과 최소 RPM 값을 변속기 내 MCU로 보내는 컨트롤러 스틱 최대화인지 최소화인지 정확히 알려드리겠습니다. 전자 변속기(ESC)가 보정되지 않으면 모터가 동시에 회전하지 않거나 제대로 회전하지 않을 수 있습니다.
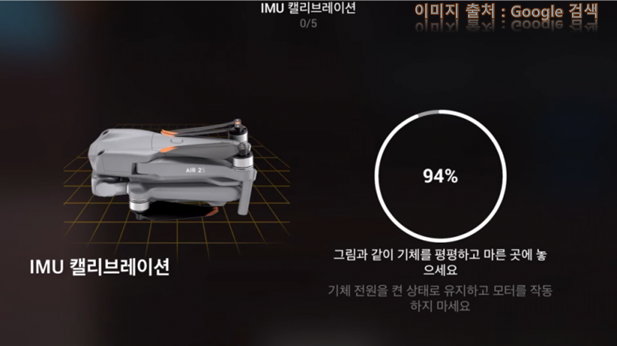
3. 레벨 보정
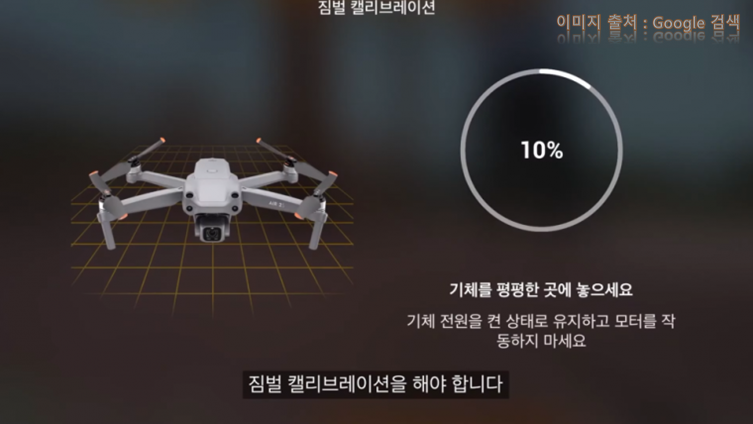
레벨 캘리브레이션의 목적은 기체가 수평이 되었을 때 전후좌우 방향의 균형 상태를 FC(Air Traffic Controller)에 정확하게 알려주는 것입니다. 수평 캘리브레이션이 올바르지 않으면 기울어진 상태를 수평으로 인식하여 상승할 때 기체가 기울어져 올라가거나 한 방향으로 전복됩니다.
수평 보정을 수행하는 방법
가다. 먼저 기체를 평평한 표면에 놓습니다.
나. 양면테이프 등으로 수평계를 평면에 고정합니다.
모두. 드론에 장착된 FC(Flight Controller) PC 지원 소프트웨어를 다운로드하여 기체에 연결합니다.
라. 소프트웨어에서 수평 보정 모드를 찾아 수평 또는 레벨링 기능으로 진행합니다.
영혼. 완료된 상태 메시지를 검토하고 저장합니다.
4. 나침반 보정
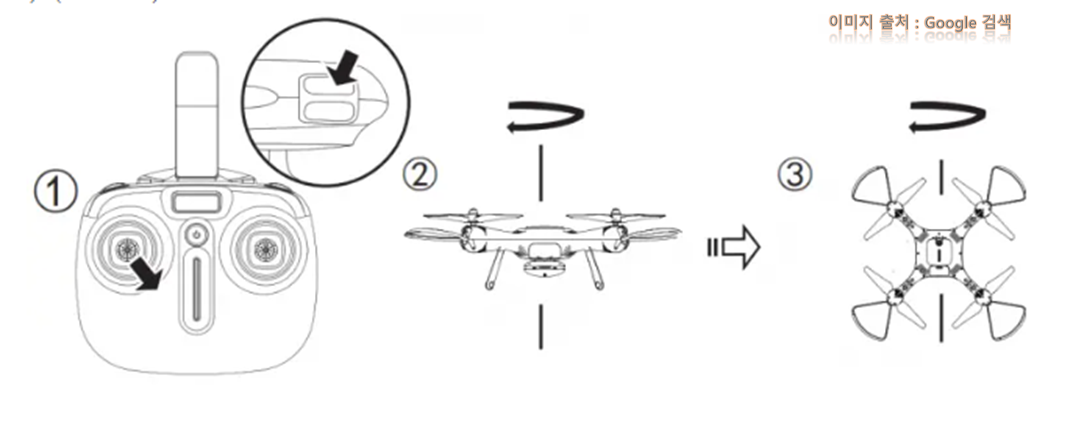
콤파스 캘리브레이션은 FC(Flight Controller)가 지구 자기장을 감지하는 지자기 센서 값을 통해 비행 방향을 정확하게 감지하도록 하는 작업이다. 단, GPS 모듈이 설치된 상태에서만 FC를 수행하면 됩니다.

지구 자기장이 보정되지 않으면 기체가 방향을 올바르게 인식하지 못하여 잘못된 방향으로 비행할 수 있습니다. 예방 차원에서 지자기장 교정은 전자파 간섭이 없는 곳에서 실시하고, 자동차가 있는 주차장이나 근거리 철제 펜스 등은 교정에 적합하지 않습니다. 또한 철제 물체와 15m 이상 떨어진 곳에서 시행해야 하며, 주머니에서 차 열쇠, 휴대폰 등을 꺼낸 후 시행하는 것이 바람직하다.
오늘은 드론에서 사용하는 캘리브레이션, 즉 캘리브레이션에 대해 알아보았습니다. 대한민국의 드론 배틀을 부르며 오늘 포스팅을 마치겠습니다.
감사해요::))